Examples¶
Reading and plotting data from the ISMN¶
This example program chooses a random Network and Station and plots the first variable,depth,sensor combination. To see how to get data for a variable from all stations see the next example.
It can be found in the /examples folder of the pytesmo package under the name plot_ISMN_data.py.
In[1]:
import pytesmo.io.ismn.interface as ismn
import os
import matplotlib.pyplot as plt
import random
In[2]:
#path unzipped file downloaded from the ISMN web portal
#on windows the first string has to be your drive letter
#like 'C:\\'
path_to_ismn_data = os.path.join('D:\\','small_projects','cpa_2013_07_ISMN_userformat_reader',
'header_values_parser_test')
In[3]:
#initialize interface, this can take up to a few minutes the first
#time, since all metadata has to be collected
ISMN_reader = ismn.ISMN_Interface(path_to_ismn_data)
#plot available station on a map
fig, ax = ISMN_reader.plot_station_locations()
plt.show()
In[4]:
#select random network and station to plot
networks = ISMN_reader.list_networks()
print "Available Networks:"
print networks
Available Networks:
['OZNET']
In[5]:
network = random.choice(networks)
stations = ISMN_reader.list_stations(network = network)
print "Available Stations in Network %s"%network
print stations
Available Stations in Network OZNET
['Alabama' 'Balranald-Bolton_Park' 'Banandra' 'Benwerrin' 'Bundure'
'Canberra_Airport' 'Cheverelis' 'Cooma_Airfield' 'Cootamundra_Aerodrome'
'Cox' 'Crawford' 'Dry_Lake' 'Eulo' 'Evergreen' 'Ginninderra_K4'
'Ginninderra_K5' 'Griffith_Aerodrome' 'Hay_AWS' 'Keenan' 'Kyeamba_Downs'
'Kyeamba_Mouth' 'Kyeamba_Station' 'Rochedale' 'S_Coleambally' 'Samarra'
'Silver_Springs' 'Spring_Bank' 'Strathvale' 'Uri_Park' 'Waitara'
'Weeroona' 'West_Wyalong_Airfield' 'Widgiewa' 'Wollumbi' 'Wynella'
'Yamma_Road' 'Yammacoona' 'Yanco_Research_Station']
In[6]:
station = random.choice(stations)
station_obj = ISMN_reader.get_station(station)
print "Available Variables at Station %s"%station
#get the variables that this station measures
variables = station_obj.get_variables()
print variables
Available Variables at Station Evergreen
['precipitation' 'soil moisture' 'soil temperature']
In[7]:
#to make sure the selected variable is not measured
#by different sensors at the same depths
#we also select the first depth and the first sensor
#even if there is only one
depths_from,depths_to = station_obj.get_depths(variables[0])
sensors = station_obj.get_sensors(variables[0],depths_from[0],depths_to[0])
#read the data of the variable, depth, sensor combination
time_series = station_obj.read_variable(variables[0],depth_from=depths_from[0],depth_to=depths_to[0],sensor=sensors[0])
#print information about the selected time series
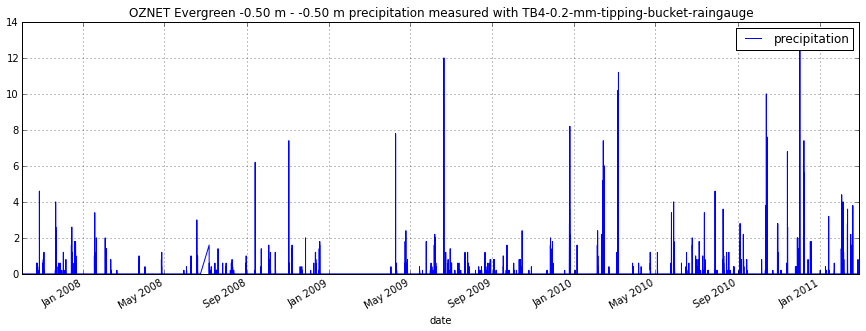
print "Selected time series is:"
print time_series
Selected time series is:
OZNET Evergreen -0.50 m - -0.50 m precipitation measured with TB4-0.2-mm-tipping-bucket-raingauge
In[8]:
#plot the data
time_series.plot()
#with pandas 0.12 time_series.plot() also works
plt.legend()
plt.show()
In[9]:
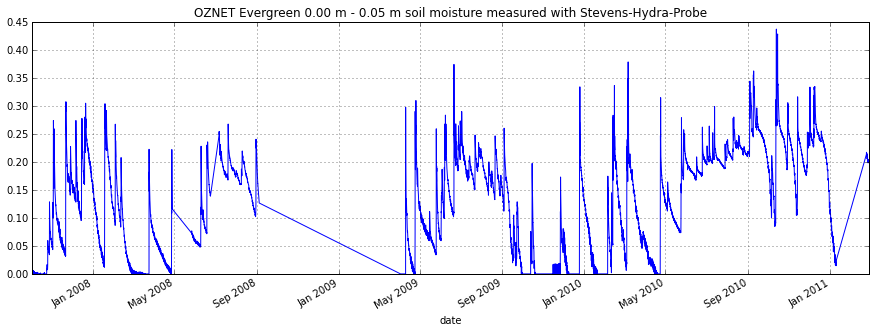
#we also want to see soil moisture
sm_depht_from,sm_depht_to = station_obj.get_depths('soil moisture')
print sm_depht_from,sm_depht_to
[ 0. 0. 0.3 0.6] [ 0.05 0.3 0.6 0.9 ]
In[10]:
#read sm data measured in first layer 0-0.05m
sm = station_obj.read_variable('soil moisture',depth_from=0,depth_to=0.05)
sm.plot()
plt.show()
Calculating anomalies and climatologies¶
This Example script reads and plots ASCAT H25 SSM data. The pytesmo.time_series.anomaly module
is then used to calculate anomalies and climatologies of the time series.
It can be found in the /examples folder of the pytesmo package under the name anomalies.py
import pytesmo.io.sat.ascat as ascat
import pytesmo.time_series as ts
import os
import matplotlib.pyplot as plt
ascat_folder = os.path.join('R:\\','Datapool_processed','WARP','WARP5.5',
'ASCAT_WARP5.5_R1.2','080_ssm','netcdf')
ascat_grid_folder = os.path.join('R:\\','Datapool_processed','WARP','ancillary','warp5_grid')
#init the ASCAT_SSM reader with the paths
ascat_SSM_reader = ascat.AscatH25_SSM(ascat_folder,ascat_grid_folder)
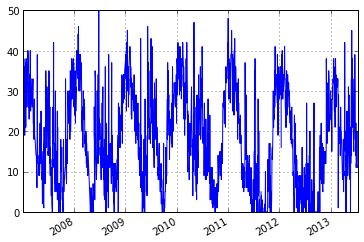
ascat_ts = ascat_SSM_reader.read_ssm(45,0)
#plot soil moisture
ascat_ts.data['sm'].plot()
<matplotlib.axes.AxesSubplot at 0x22ee3550>
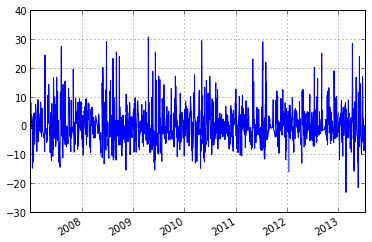
#calculate anomaly based on moving +- 17 day window
anomaly = ts.anomaly.calc_anomaly(ascat_ts.data['sm'], window_size=35)
anomaly.plot()
<matplotlib.axes.AxesSubplot at 0x269109e8>
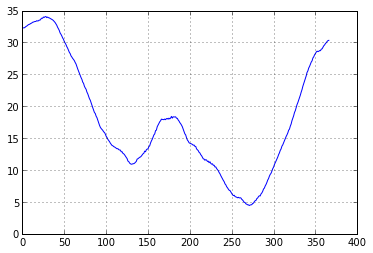
#calculate climatology
climatology = ts.anomaly.calc_climatology(ascat_ts.data['sm'])
climatology.plot()
<matplotlib.axes.AxesSubplot at 0x1bc54ef0>
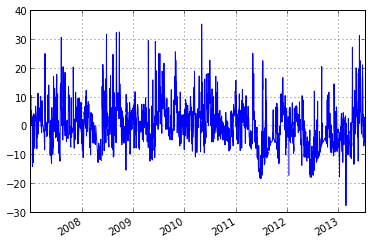
#calculate anomaly based on climatology
anomaly_clim = ts.anomaly.calc_anomaly(ascat_ts.data['sm'], climatology=climatology)
anomaly_clim.plot()
<matplotlib.axes.AxesSubplot at 0x1bc76860>
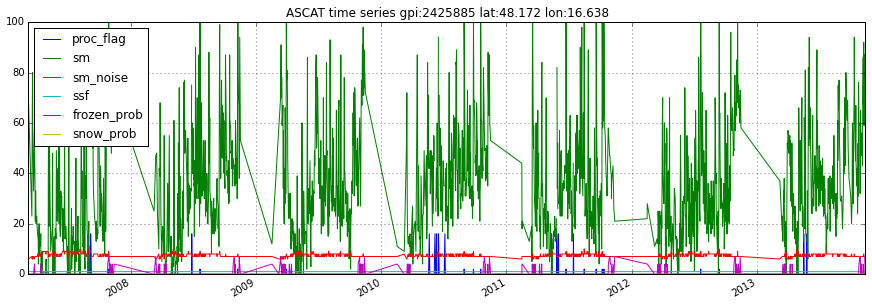
Calculation of the Soil Water Index¶
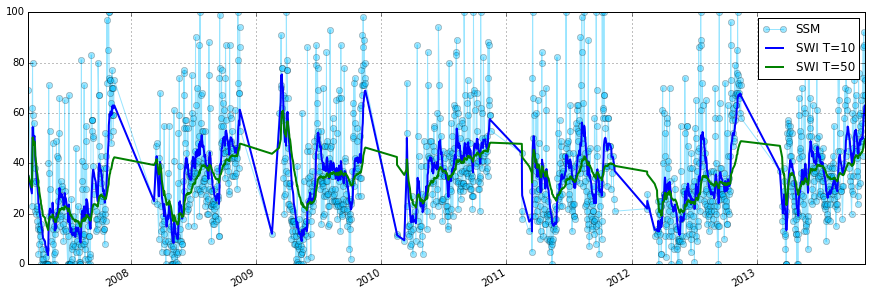
The Soil Water Index(SWI) which is a method to estimate root zone soil moisture can be calculated from Surface Soil Moisture(SSM) using an exponential Filter. For more details see this publication of C.Abergel et.al. The following example shows how to calculate the SWI for two T values from ASCAT H25 SSM.
import os
import matplotlib.pyplot as plt
from pytesmo.time_series.filters import exp_filter
import ascat
ascat_folder = os.path.join('/media', 'sf_R', 'Datapool_processed',
'WARP', 'WARP5.5', 'IRMA0_WARP5.5_P2',
'R1', '080_ssm', 'netcdf')
ascat_grid_folder = os.path.join('/media', 'sf_R',
'Datapool_processed', 'WARP',
'ancillary', 'warp5_grid')
# init the ASCAT_SSM reader with the paths
# ascat_folder is the path in which the cell files are
# located e.g. TUW_METOP_ASCAT_WARP55R12_0600.nc
# ascat_grid_folder is the path in which the file
# TUW_WARP5_grid_info_2_1.nc is located
# let's not include the orbit direction since it is saved as 'A'
# or 'D' it can not be plotted
# the AscatH25_SSM class automatically detects the version of data
# that you have in your ascat_folder. Please do not mix files of
# different versions in one folder
ascat_SSM_reader = ascat.AscatH25_SSM(ascat_folder, ascat_grid_folder,
include_in_df=['sm', 'sm_noise',
'ssf', 'proc_flag'])
ascat_ts = ascat_SSM_reader.read_ssm(gpi, mask_ssf=True, mask_frozen_prob=10,
mask_snow_prob=10)
ascat_ts.plot()
# Drop NA measurements
ascat_sm_ts = ascat_ts.data[['sm', 'sm_noise']].dropna()
# Get julian dates of time series
jd = ascat_sm_ts.index.to_julian_date().get_values()
# Calculate SWI T=10
ascat_sm_ts['swi_t10'] = exp_filter(ascat_sm_ts['sm'].values, jd, ctime=10)
ascat_sm_ts['swi_t50'] = exp_filter(ascat_sm_ts['sm'].values, jd, ctime=50)
fig, ax = plt.subplots(1, 1, figsize=(15, 5))
ascat_sm_ts['sm'].plot(ax=ax, alpha=0.4, marker='o',color='#00bfff', label='SSM')
ascat_sm_ts['swi_t10'].plot(ax=ax, lw=2,label='SWI T=10')
ascat_sm_ts['swi_t50'].plot(ax=ax, lw=2,label='SWI T=50')
plt.legend()
The pytesmo validation framework¶
The pytesmo validation framework takes care of iterating over datasets, spatial and temporal matching as well as sclaing. It uses metric calculators to then calculate metrics that are returned to the user. There are several metrics calculators included in pytesmo but new ones can be added simply by writing a new class.
Overview¶
How does the validation framework work? It makes these assumptions about the used datasets:
- The dataset readers that are used have a
read_tsmethod that can be called either by a grid point index (gpi) which can be any indicator that identifies a certain grid point or by using longitude and latitude. This means that both call signaturesread_ts(gpi)andread_ts(lon, lat)must be valid. Please check the pygeobase documentation for more details on how a fully compatible dataset class should look. But a simpleread_tsmethod should do for the validation framework. This assumption can be relaxed by using theread_ts_nameskeyword in the pytesmo.validation_framework.data_manager.DataManager class. - The
read_tsmethod returns a pandas.DataFrame time series. - Ideally the datasets classes also have a
gridattribute that is a pygeogrids grid. This makes the calculation of lookup tables easily possible and the nearest neighbor search faster.
Fortunately these assumptions are true about the dataset readers included in pytesmo.
It also makes a few assumptions about how to perform a validation. For a comparison study it is often necessary to choose a spatial reference grid, a temporal reference and a scaling or data space reference.
Spatial reference¶
The spatial reference is the one to which all the other datasets are matched spatially. Often through nearest neighbor search. The validation framework uses grid points of the dataset specified as the spatial reference to spatially match all the other datasets with nearest neighbor search. Other, more sophisticated spatial matching algorithms are not implemented at the moment. If you need a more complex spatial matching then a preprocessing of the data is the only option at the moment.
Temporal reference¶
The temporal reference is the dataset to which the other dataset are temporally matched. That means that the nearest observation to the reference timestamps in a certain time window is chosen for each comparison dataset. This is by default done by the temporal matching module included in pytesmo. How many datasets should be matched to the reference dataset at once can be configured, we will cover how to do this later.
Data space reference¶
It is often necessary to bring all the datasets into a common data space
by using scaling. Pytesmo offers a choice of several scaling algorithms
(e.g. CDF matching, min-max scaling, mean-std scaling, triple
collocation based scaling). The data space reference can also be chosen
independently from the other two references. New scaling methods can be
implemented by writing a scaler class. An example of a scaler class can
be found in the pytesmo.validation_framework.data_scalers.DefaultScaler.
Data Flow¶
After it is initialized, the validation framework works through the following steps:
- Read all the datasets for a certain job (gpi, lon, lat)
- Read all the masking datasets if any
- Mask the temporal reference dataset using the masking data
- Temporally match all the chosen combinations of temporal reference and other datasets
- Scale all datasets into the data space of the data space reference, if scaling is activated
- Turn the temporally matched time series over to the metric calculators
- Get the calculated metrics from the metric calculators
- Put all the metrics into a dictionary by dataset combination and return them.
Masking datasets¶
Masking datasets can be used if the the datasets that are compared do
not contain the necessary information to mask them. For example we might
want to use modelled soil temperature data to mask our soil moisture
observations before comparing them. To be able to do that we just need a
Dataset that returns a pandas.DataFrame with one column of boolean data
type. Everywhere where the masking dataset is True the data will be
masked.
Let’s look at a first example.
Example soil moisture validation: ASCAT - ISMN¶
This example shows how to setup the pytesmo validation framework to perform a comparison between ASCAT and ISMN data.
import os
import tempfile
import pytesmo.validation_framework.metric_calculators as metrics_calculators
from datetime import datetime
from ascat.timeseries import AscatSsmCdr
from pytesmo.io.ismn.interface import ISMN_Interface
from pytesmo.validation_framework.validation import Validation
from pytesmo.validation_framework.results_manager import netcdf_results_manager
First we initialize the data readers that we want to use. In this case the ASCAT soil moisture time series and in situ data from the ISMN.
Initialize ASCAT reader
ascat_data_folder = os.path.join('/home', 'cpa', 'workspace', 'pytesmo',
'tests', 'test-data', 'sat', 'ascat', 'netcdf', '55R22')
ascat_grid_folder = os.path.join('/media/sf_R', 'Datapool_processed', 'WARP',
'ancillary', 'warp5_grid')
static_layers_folder = os.path.join('/home', 'cpa', 'workspace', 'pytesmo',
'tests', 'test-data', 'sat',
'h_saf', 'static_layer')
ascat_reader = AscatSsmCdr(ascat_data_folder, ascat_grid_folder,
static_layer_path=static_layers_folder)
Initialize ISMN reader
ismn_data_folder = '/data/Development/python/workspace/pytesmo/tests/test-data/ismn/multinetwork/header_values/'
ismn_reader = ISMN_Interface(ismn_data_folder)
The validation is run based on jobs. A job consists of at least three
lists or numpy arrays specifing the grid point index, its latitude and
longitude. In the case of the ISMN we can use the dataset_ids that
identify every time series in the downloaded ISMN data as our grid point
index. We can then get longitude and latitude from the metadata of the
dataset.
DO NOT CHANGE the name *jobs* because it will be searched during the parallel processing!
jobs = []
ids = ismn_reader.get_dataset_ids(variable='soil moisture', min_depth=0, max_depth=0.1)
for idx in ids:
metadata = ismn_reader.metadata[idx]
jobs.append((idx, metadata['longitude'], metadata['latitude']))
print jobs
[(0, 102.13330000000001, 33.666600000000003), (1, 102.13330000000001, 33.883299999999998), (2, -120.9675, 38.430030000000002), (3, -120.78559, 38.149560000000001), (4, -120.80638999999999, 38.17353), (5, -105.417, 34.25), (6, -97.082999999999998, 37.133000000000003), (7, -86.549999999999997, 34.783000000000001)]
For this small test dataset it is only one job
It is important here that the ISMN reader has a read_ts function that
works by just using the dataset_id. In this way the validation
framework can go through the jobs and read the correct time series.
data = ismn_reader.read_ts(ids[0])
print data.head()
soil moisture soil moisture_flag soil moisture_orig_flag
date_time
2008-07-01 00:00:00 0.45 U M
2008-07-01 01:00:00 0.45 U M
2008-07-01 02:00:00 0.45 U M
2008-07-01 03:00:00 0.45 U M
2008-07-01 04:00:00 0.45 U M
Initialize the Validation class¶
The Validation class is the heart of the validation framwork. It contains the information about which datasets to read using which arguments or keywords and if they are spatially compatible. It also contains the settings about which metric calculators to use and how to perform the scaling into the reference data space. It is initialized in the following way:
datasets = {'ISMN': {'class': ismn_reader,
'columns': ['soil moisture']},
'ASCAT': {'class': ascat_reader, 'columns': ['sm'],
'kwargs': {'mask_frozen_prob': 80,
'mask_snow_prob': 80,
'mask_ssf': True}}
}
The datasets dictionary contains all the information about the datasets
to read. The class is the dataset class to use which we have already
initialized. The columns key describes which columns of the dataset
interest us for validation. This a mandatory field telling the framework
which other columns to ignore. In this case the columns
soil moisture_flag and soil moisture_orig_flag will be ignored
by the ISMN reader. We can also specify additional keywords that should
be given to the read_ts method of the dataset reader. In this case
we want the ASCAT reader to mask the ASCAT soil moisture using the
included frozen and snow probabilities as well as the SSF. There are
also other keys that can be used here. Please see the documentation for
explanations.
period = [datetime(2007, 1, 1), datetime(2014, 12, 31)]
basic_metrics = metrics_calculators.BasicMetrics(other_name='k1')
process = Validation(
datasets, 'ISMN', {(2, 2): basic_metrics.calc_metrics},
temporal_ref='ASCAT',
scaling='lin_cdf_match',
scaling_ref='ASCAT',
period=period)
During the initialization of the Validation class we can also tell it
other things that it needs to know. In this case it uses the datasets we
have specified earlier. The spatial reference is the 'ISMN' dataset
which is the second argument. The third argument looks a little bit
strange so let’s look at it in more detail.
It is a dictionary with a tuple as the key and a function as the value.
The key tuple (n, k) has the following meaning: n datasets are
temporally matched together and then given in sets of k columns to
the metric calculator. The metric calculator then gets a DataFrame with
the columns [‘ref’, ‘k1’, ‘k2’ …] and so on depending on the value of
k. The value of (2, 2) makes sense here since we only have two
datasets and all our metrics also take two inputs.
This can be used in more complex scenarios to e.g. have three input datasets that are all temporally matched together and then combinations of two input datasets are given to one metric calculator while all three datasets are given to another metric calculator. This could look like this:
{ (3 ,2): metric_calc,
(3, 3): triple_collocation}
Create the variable *save_path* which is a string representing the path where the results will be saved. DO NOT CHANGE the name *save_path* because it will be searched during the parallel processing!
save_path = tempfile.mkdtemp()
import pprint
for job in jobs:
results = process.calc(*job)
pprint.pprint(results)
netcdf_results_manager(results, save_path)
{(('ASCAT', 'sm'), ('ISMN', 'soil moisture')): {'BIAS': array([-0.04330891], dtype=float32),
'R': array([ 0.7128256], dtype=float32),
'RMSD': array([ 7.72966719], dtype=float32),
'gpi': array([0], dtype=int32),
'lat': array([ 33.6666]),
'lon': array([ 102.1333]),
'n_obs': array([384], dtype=int32),
'p_R': array([ 0.], dtype=float32),
'p_rho': array([ 0.], dtype=float32),
'p_tau': array([ nan], dtype=float32),
'rho': array([ 0.70022893], dtype=float32),
'tau': array([ nan], dtype=float32)}}
{(('ASCAT', 'sm'), ('ISMN', 'soil moisture')): {'BIAS': array([ 0.237454], dtype=float32),
'R': array([ 0.4996146], dtype=float32),
'RMSD': array([ 11.58347607], dtype=float32),
'gpi': array([1], dtype=int32),
'lat': array([ 33.8833]),
'lon': array([ 102.1333]),
'n_obs': array([357], dtype=int32),
'p_R': array([ 6.12721281e-24], dtype=float32),
'p_rho': array([ 2.47165110e-28], dtype=float32),
'p_tau': array([ nan], dtype=float32),
'rho': array([ 0.53934574], dtype=float32),
'tau': array([ nan], dtype=float32)}}
{(('ASCAT', 'sm'), ('ISMN', 'soil moisture')): {'BIAS': array([-0.63301021], dtype=float32),
'R': array([ 0.78071409], dtype=float32),
'RMSD': array([ 14.57700157], dtype=float32),
'gpi': array([2], dtype=int32),
'lat': array([ 38.43003]),
'lon': array([-120.9675]),
'n_obs': array([482], dtype=int32),
'p_R': array([ 0.], dtype=float32),
'p_rho': array([ 0.], dtype=float32),
'p_tau': array([ nan], dtype=float32),
'rho': array([ 0.69356072], dtype=float32),
'tau': array([ nan], dtype=float32)}}
{(('ASCAT', 'sm'), ('ISMN', 'soil moisture')): {'BIAS': array([-1.9682411], dtype=float32),
'R': array([ 0.79960084], dtype=float32),
'RMSD': array([ 13.06224251], dtype=float32),
'gpi': array([3], dtype=int32),
'lat': array([ 38.14956]),
'lon': array([-120.78559]),
'n_obs': array([141], dtype=int32),
'p_R': array([ 1.38538225e-32], dtype=float32),
'p_rho': array([ 4.62621032e-39], dtype=float32),
'p_tau': array([ nan], dtype=float32),
'rho': array([ 0.84189808], dtype=float32),
'tau': array([ nan], dtype=float32)}}
{(('ASCAT', 'sm'), ('ISMN', 'soil moisture')): {'BIAS': array([-0.21823417], dtype=float32),
'R': array([ 0.80635566], dtype=float32),
'RMSD': array([ 12.90389824], dtype=float32),
'gpi': array([4], dtype=int32),
'lat': array([ 38.17353]),
'lon': array([-120.80639]),
'n_obs': array([251], dtype=int32),
'p_R': array([ 0.], dtype=float32),
'p_rho': array([ 4.20389539e-45], dtype=float32),
'p_tau': array([ nan], dtype=float32),
'rho': array([ 0.74206454], dtype=float32),
'tau': array([ nan], dtype=float32)}}
{(('ASCAT', 'sm'), ('ISMN', 'soil moisture')): {'BIAS': array([-0.14228749], dtype=float32),
'R': array([ 0.50703788], dtype=float32),
'RMSD': array([ 14.24668026], dtype=float32),
'gpi': array([5], dtype=int32),
'lat': array([ 34.25]),
'lon': array([-105.417]),
'n_obs': array([1927], dtype=int32),
'p_R': array([ 0.], dtype=float32),
'p_rho': array([ 3.32948515e-42], dtype=float32),
'p_tau': array([ nan], dtype=float32),
'rho': array([ 0.30299741], dtype=float32),
'tau': array([ nan], dtype=float32)}}
{(('ASCAT', 'sm'), ('ISMN', 'soil moisture')): {'BIAS': array([ 0.2600247], dtype=float32),
'R': array([ 0.53643185], dtype=float32),
'RMSD': array([ 21.19682884], dtype=float32),
'gpi': array([6], dtype=int32),
'lat': array([ 37.133]),
'lon': array([-97.083]),
'n_obs': array([1887], dtype=int32),
'p_R': array([ 0.], dtype=float32),
'p_rho': array([ 0.], dtype=float32),
'p_tau': array([ nan], dtype=float32),
'rho': array([ 0.53143877], dtype=float32),
'tau': array([ nan], dtype=float32)}}
{(('ASCAT', 'sm'), ('ISMN', 'soil moisture')): {'BIAS': array([-0.04437888], dtype=float32),
'R': array([ 0.6058206], dtype=float32),
'RMSD': array([ 17.3883934], dtype=float32),
'gpi': array([7], dtype=int32),
'lat': array([ 34.783]),
'lon': array([-86.55]),
'n_obs': array([1652], dtype=int32),
'p_R': array([ 0.], dtype=float32),
'p_rho': array([ 0.], dtype=float32),
'p_tau': array([ nan], dtype=float32),
'rho': array([ 0.62204134], dtype=float32),
'tau': array([ nan], dtype=float32)}}
The validation is then performed by looping over all the defined jobs
and storing the results. You can see that the results are a dictionary
where the key is a tuple defining the exact combination of datasets and
columns that were used for the calculation of the metrics. The metrics
itself are a dictionary of metric-name: numpy.ndarray which also
include information about the gpi, lon and lat. Since all the
information contained in the job is given to the metric calculator they
can be stored in the results.
Storing of the results to disk is at the moment supported by the
netcdf_results_manager which creates a netCDF file for each dataset
combination and stores each metric as a variable. We can inspect the
stored netCDF file which is named after the dictionary key:
import netCDF4
results_fname = os.path.join(save_path, 'ASCAT.sm_with_ISMN.soil moisture.nc')
with netCDF4.Dataset(results_fname) as ds:
for var in ds.variables:
print var, ds.variables[var][:]
n_obs [ 384 357 482 141 251 1927 1887 1652]
tau [ nan nan nan nan nan nan nan nan]
gpi [0 1 2 3 4 5 6 7]
RMSD [ 7.72966719 11.58347607 14.57700157 13.06224251 12.90389824
14.24668026 21.19682884 17.3883934 ]
lon [ 102.1333 102.1333 -120.9675 -120.78559 -120.80639 -105.417 -97.083
-86.55 ]
p_tau [ nan nan nan nan nan nan nan nan]
BIAS [-0.04330891 0.237454 -0.63301021 -1.9682411 -0.21823417 -0.14228749
0.2600247 -0.04437888]
p_rho [ 0.00000000e+00 2.47165110e-28 0.00000000e+00 4.62621032e-39
4.20389539e-45 3.32948515e-42 0.00000000e+00 0.00000000e+00]
rho [ 0.70022893 0.53934574 0.69356072 0.84189808 0.74206454 0.30299741
0.53143877 0.62204134]
lat [ 33.6666 33.8833 38.43003 38.14956 38.17353 34.25 37.133
34.783 ]
R [ 0.7128256 0.4996146 0.78071409 0.79960084 0.80635566 0.50703788
0.53643185 0.6058206 ]
p_R [ 0.00000000e+00 6.12721281e-24 0.00000000e+00 1.38538225e-32
0.00000000e+00 0.00000000e+00 0.00000000e+00 0.00000000e+00]
Parallel processing¶
The same code can be executed in parallel by defining the following
start_processing function.
def start_processing(job):
try:
return process.calc(*job)
except RuntimeError:
return process.calc(*job)
pytesmo.validation_framework.start_validation can then be used to
run your validation in parallel. Your setup code can look like this
Ipython notebook without the loop over the jobs. Otherwise the
validation would be done twice. Save it into a .py file e.g.
my_validation.py.
After starting the ipyparallel cluster you can then execute the following code:
from pytesmo.validation_framework import start_validation
# Note that before starting the validation you must start a controller
# and engines, for example by using: ipcluster start -n 4
# This command will launch a controller and 4 engines on the local machine.
# Also, do not forget to change the setup_code path to your current setup.
setup_code = "my_validation.py"
start_validation(setup_code)
Masking datasets¶
Masking datasets are datasets that return a pandas DataFrame with
boolean values. True means that the observation should be masked,
False means it should be kept. All masking datasets are temporally
matched in pairs to the temporal reference dataset. Only observations
for which all masking datasets have a value of False are kept for
further validation.
The masking datasets have the same format as the dataset dictionary and
can be specified in the Validation class with the masking_datasets
keyword.
Masking adapter¶
To easily transform an existing dataset into a masking dataset
pytesmo offers a adapter class that calls the read_ts method of
an existing dataset and performs the masking based on an operator and a
given threshold.
from pytesmo.validation_framework.adapters import MaskingAdapter
ds_mask = MaskingAdapter(ismn_reader, '<', 0.2)
print ds_mask.read_ts(ids[0])['soil moisture'].head()
date_time
2008-07-01 00:00:00 False
2008-07-01 01:00:00 False
2008-07-01 02:00:00 False
2008-07-01 03:00:00 False
2008-07-01 04:00:00 False
Name: soil moisture, dtype: bool
Triple collocation and triple collocation based scaling¶
This example shows how to use the triple collocation routines in the pytesmo.metrics module.
It also is a crash course to the theory behind triple collocation and links to relevant publications.
Triple collocation¶
Triple collocation can be used to estimate the random error variance in three collocated datasets of the same geophysical variable [Stoffelen_1998]. Triple collocation assumes the following error model for each time series:

in which  is the true value of the geophysical variable
e.g. soil moisture.
is the true value of the geophysical variable
e.g. soil moisture.  and
and  are additive and
multiplicative biases of the data and
are additive and
multiplicative biases of the data and  is a zero mean
random noise which we want to estimate.
is a zero mean
random noise which we want to estimate.
Estimation of the triple collocation error is
commonly done using one of two approaches:
- Scaling/calibrating the datasets to a reference dataset (removing
and ) and calculating the triple
collocation error based on these datasets.
- Estimation of the triple collocation error based on the covariances
between the datasets. This also yields (linear) scaling parameters
() which can be used if scaling of the datasets is
desired.
Note
The scaling approaches commonly used in approach 1 are not ideal for e.g. data assimilation. Under the assumption that assimilated observations should have orthogonal errors, triple collocation based scaling parameters are ideal [Yilmaz_2013].
Approach 2 is recommended for scaling if three datasets are available.
Generate a synthetic dataset¶
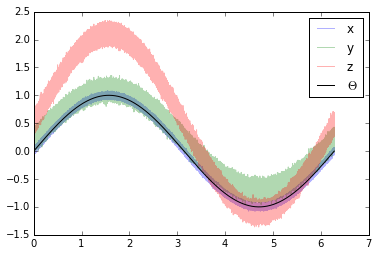
We can now make three synthetic time series based on the defined error model:



In which we will assume that our i.e. the real observed
signal, is a simple sine curve.
import numpy as np
import matplotlib.pyplot as plt
# number of observations
n = 1000000
# x coordinates for initializing the sine curve
coord = np.linspace(0, 2*np.pi, n)
signal = np.sin(coord)
# error i.e. epsilon of the three synthetic time series
sig_err_x = 0.02
sig_err_y = 0.07
sig_err_z = 0.04
err_x = np.random.normal(0, sig_err_x, n)
err_y = np.random.normal(0, sig_err_y, n)
err_z = np.random.normal(0, sig_err_z, n)
# additive and multiplicative biases
# they are assumed to be zero for dataset x
alpha_y = 0.2
alpha_z = 0.5
beta_y = 0.9
beta_z = 1.6
x = signal + err_x
# here we assume errors that are already scaled
y = alpha_y + beta_y * (signal + err_y)
z = alpha_z + beta_z * (signal + err_z)
plt.plot(coord, x, alpha=0.3, label='x')
plt.plot(coord, y, alpha=0.3, label='y')
plt.plot(coord, z, alpha=0.3, label='z')
plt.plot(coord, signal, 'k', label='$\Theta$')
plt.legend()
plt.show()
Approach 1¶
We can now use these three time series and estimate the
values using approach 1.
The functions we can be found in:
We will use mean-standard deviation scaling. This type of scaling brings the data to the same mean and standard deviation as the reference dataset.
import pytesmo.scaling as scaling
import pytesmo.metrics as metrics
# scale to x as the reference
y_scaled = scaling.mean_std(y, x)
z_scaled = scaling.mean_std(z, x)
plt.plot(coord, x, alpha=0.3, label='x')
plt.plot(coord, y_scaled, alpha=0.3, label='y scaled')
plt.plot(coord, z_scaled, alpha=0.3, label='z scaled')
plt.plot(coord, signal, 'k', label='$\Theta$')
plt.legend()
plt.show()
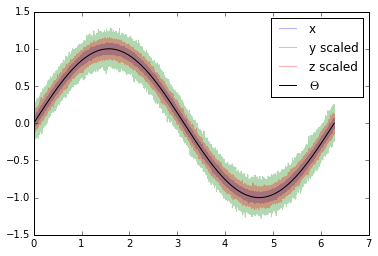
The three datasets do now have the same mean and standard deviation.
This means that and have been removed from
 and
and  .
.
From these three scaled datasets we can now estimate the triple collocation error following the method outlined in [Scipal_2008]:
The basic formula (formula 4 in the paper) adapted to the notation we use in this tutorial is:



where the  brackets mean the temporal mean. This
function is implemented in
brackets mean the temporal mean. This
function is implemented in pytesmo.metrics.tcol_error() which we can
now use to estimate the standard deviation of :

e_x, e_y, e_z = metrics.tcol_error(x, y_scaled, z_scaled)
print "Error of x estimated: {:.4f}, true: {:.4f}".format(e_x, sig_err_x)
print "Error of y estimated: {:.4f}, true: {:.4f}".format(e_y, sig_err_y)
print "Error of z estimated: {:.4f}, true: {:.4f}".format(e_z, sig_err_z)
Error of x estimated: 0.0200, true: 0.0200
Error of y estimated: 0.0697, true: 0.0700
Error of z estimated: 0.0399, true: 0.0400
We can see that the estimated error standard deviation is very close to the one we set for our artificial time series in the beginning.
Approach 2¶
In approach 2 we can estimate the triple collocation errors, the scaling
parameter and the signal to noise ratio directly from the
covariances of the dataset. For a general overview and how approach 1
and 2 are related please see [Gruber_2015].
Estimation of the error variances from the covariances of the datasets
(e.g.  for the covariance between
for the covariance between  and
) is done using the following formula:
and
) is done using the following formula:
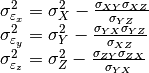
can also be estimated from the covariances:

The signal to noise ratio (SNR) is also calculated from the variances and covariances:
![\\\text{SNR}_X[dB] = -10\log\left(\frac{\sigma_{X}^2\sigma_{YZ}}{\sigma_{XY}\sigma_{XZ}}-1\right)\\ \text{SNR}_Y[dB] = -10\log\left(\frac{\sigma_{Y}^2\sigma_{XZ}}{\sigma_{YX}\sigma_{YZ}}-1\right)\\ \text{SNR}_Z[dB] = -10\log\left(\frac{\sigma_{Z}^2\sigma_{XY}}{\sigma_{ZX}\sigma_{ZY}}-1\right)](_images/math/430e54905e019802cf0f3f5cc864e5d0917078e7.png)
It is given in dB to make it symmetric around zero. If the value is zero it means that the signal variance and the noise variance are equal. +3dB means that the signal variance is twice as high as the noise variance.
This approach is implemented in pytesmo.metrics.tcol_snr().
snr, err, beta = metrics.tcol_snr(x, y, z)
print "Error of x approach 1: {:.4f}, approach 2: {:.4f}, true: {:.4f}".format(e_x, err[0], sig_err_x)
print "Error of y approach 1: {:.4f}, approach 2: {:.4f}, true: {:.4f}".format(e_y, err[1], sig_err_y)
print "Error of z approach 1: {:.4f}, approach 2: {:.4f}, true: {:.4f}".format(e_z, err[2], sig_err_z)
Error of x approach 1: 0.0200, approach 2: 0.0199, true: 0.0200
Error of y approach 1: 0.0697, approach 2: 0.0700, true: 0.0700
Error of z approach 1: 0.0399, approach 2: 0.0400, true: 0.0400
It can be seen that both approaches estimate very similar error variance.
We can now also check if  and
and  were
correctly estimated.
were
correctly estimated.
The function gives us the inverse values of . We can use
these values directly to scale our datasets.
print "scaling parameter for y estimated: {:.2f}, true:{:.2f}".format(1/beta[1], beta_y)
print "scaling parameter for z estimated: {:.2f}, true:{:.2f}".format(1/beta[2], beta_z)
scaling parameter for y estimated: 0.90, true:0.90
scaling parameter for z estimated: 1.60, true:1.60
y_beta_scaled = y * beta[1]
z_beta_scaled = z * beta[2]
plt.plot(coord, x, alpha=0.3, label='x')
plt.plot(coord, y_beta_scaled, alpha=0.3, label='y beta scaled')
plt.plot(coord, z_beta_scaled, alpha=0.3, label='z beta scaled')
plt.plot(coord, signal, 'k', label='$\Theta$')
plt.legend()
plt.show()
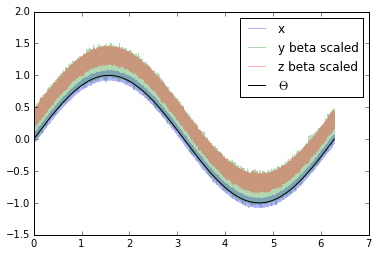
The datasets still have different mean values i.e. different
values. can be estimated through the mean of the dataset.
y_ab_scaled = y_beta_scaled - np.mean(y_beta_scaled)
z_ab_scaled = z_beta_scaled - np.mean(z_beta_scaled)
plt.plot(coord, x, alpha=0.3, label='x')
plt.plot(coord, y_ab_scaled, alpha=0.3, label='y ab scaled')
plt.plot(coord, z_ab_scaled, alpha=0.3, label='z ab scaled')
plt.plot(coord, signal, 'k', label='$\Theta$')
plt.legend()
plt.show()
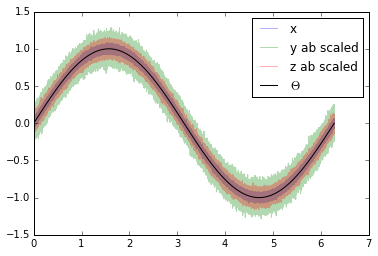
This yields scaled/calibrated datasets using triple collocation based scaling which is ideal for e.g. data assimilation.
The SNR is nothing else than the fraction of the signal variance to the noise variance in dB
Let’s first print the snr we got from pytesmo.metrics.tcol_snr()
print snr
[ 31.01493632 20.0865377 24.94339476]
Now let’s calculate the SNR starting from the variance of the sine
signal and the  values we used for our additive errors.
values we used for our additive errors.
[10*np.log10(np.var(signal)/(sig_err_x)**2),
10*np.log10(np.var(signal)/(sig_err_y)**2),
10*np.log10(np.var(signal)/(sig_err_z)**2)]
[30.969095787133575, 20.087734900128062, 24.94849587385395]
We can see that the estimated SNR and the “real” SNR of our artificial datasets are very similar.
References¶
| [Stoffelen_1998] | Stoffelen, A. (1998). Toward the true near-surface wind speed: error modeling and calibration using triple collocation. Journal of Geophysical Research: Oceans (1978–2012), 103(C4), 7755–7766. |
| [Yilmaz_2013] | Yilmaz, M. T., & Crow, W. T. (2013). The optimality of potential rescaling approaches in land data assimilation. Journal of Hydrometeorology, 14(2), 650–660. |
| [Scipal_2008] | Scipal, K., Holmes, T., De Jeu, R., Naeimi, V., & Wagner, W. (2008). A possible solution for the problem of estimating the error structure of global soil moisture data sets. Geophysical Research Letters, 35(24), . |
| [Gruber_2015] | Gruber, A., Su, C., Zwieback, S., Crow, W., Dorigo, W., Wagner, W. (2015). Recent advances in (soil moisture) triple collocation analysis. International Journal of Applied Earth Observation and Geoinformation, in press. 10.1016/j.jag.2015.09.002 |
Comparing ASCAT and insitu data from the ISMN without the validation framework¶
This example program loops through all insitu stations that measure soil moisture with a depth between 0 and 0.1m it then finds the nearest ASCAT grid point and reads the ASCAT data. After temporal matching and scaling using linear CDF matching it computes several metrics, like the correlation coefficients(Pearson’s, Spearman’s and Kendall’s), Bias, RMSD as well as the Nash–Sutcliffe model efficiency coefficient.
It also shows the usage of the pytesmo.df_metrics module.
It is stopped after 2 stations to not take to long to run and produce a lot of plots
It can be found in the /examples folder of the pytesmo package under the name compare_ISMN_ASCAT.py.
import pytesmo.io.ismn.interface as ismn
import ascat
import pytesmo.temporal_matching as temp_match
import pytesmo.scaling as scaling
import pytesmo.df_metrics as df_metrics
import pytesmo.metrics as metrics
import os
import matplotlib.pyplot as plt
ascat_folder = os.path.join('R:\\','Datapool_processed','WARP','WARP5.5',
'ASCAT_WARP5.5_R1.2','080_ssm','netcdf')
ascat_grid_folder = os.path.join('R:\\','Datapool_processed','WARP','ancillary','warp5_grid')
#init the ASCAT_SSM reader with the paths
#let's not include the orbit direction since it is saved as 'A'
#or 'D' it can not be plotted
ascat_SSM_reader = ascat.AscatH25_SSM(ascat_folder,ascat_grid_folder,
include_in_df=['sm', 'sm_noise', 'ssf', 'proc_flag'])
#set path to ISMN data
path_to_ismn_data =os.path.join('D:\\','small_projects','cpa_2013_07_ISMN_userformat_reader','header_values_parser_test')
#Initialize reader
ISMN_reader = ismn.ISMN_Interface(path_to_ismn_data)
i = 0
label_ascat='sm'
label_insitu='insitu_sm'
#this loops through all stations that measure soil moisture
for station in ISMN_reader.stations_that_measure('soil moisture'):
#this loops through all time series of this station that measure soil moisture
#between 0 and 0.1 meters
for ISMN_time_series in station.data_for_variable('soil moisture',min_depth=0,max_depth=0.1):
ascat_time_series = ascat_SSM_reader.read_ssm(ISMN_time_series.longitude,
ISMN_time_series.latitude,
mask_ssf=True,
mask_frozen_prob = 5,
mask_snow_prob = 5)
#drop nan values before doing any matching
ascat_time_series.data = ascat_time_series.data.dropna()
ISMN_time_series.data = ISMN_time_series.data.dropna()
#rename the soil moisture column in ISMN_time_series.data to insitu_sm
#to clearly differentiate the time series when they are plotted together
ISMN_time_series.data.rename(columns={'soil moisture':label_insitu},inplace=True)
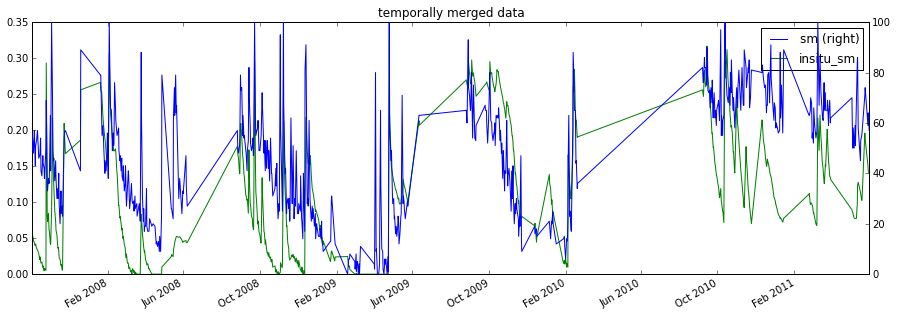
#get ISMN data that was observerd within +- 1 hour(1/24. day) of the ASCAT observation
#do not include those indexes where no observation was found
matched_data = temp_match.matching(ascat_time_series.data,ISMN_time_series.data,
window=1/24.)
#matched ISMN data is now a dataframe with the same datetime index
#as ascat_time_series.data and the nearest insitu observation
#continue only with relevant columns
matched_data = matched_data[[label_ascat,label_insitu]]
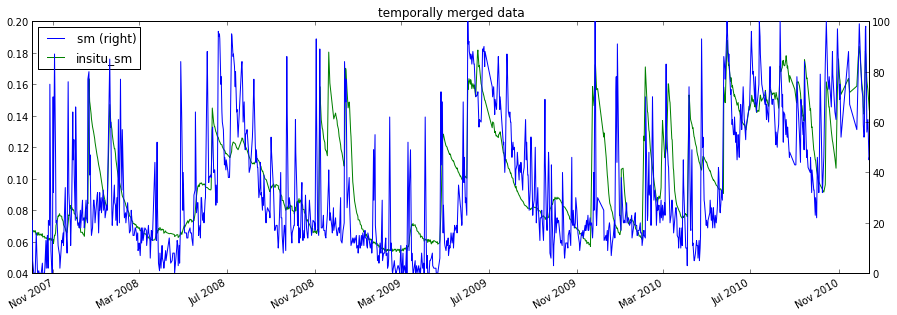
#the plot shows that ISMN and ASCAT are observed in different units
matched_data.plot(figsize=(15,5),secondary_y=[label_ascat],
title='temporally merged data')
plt.show()
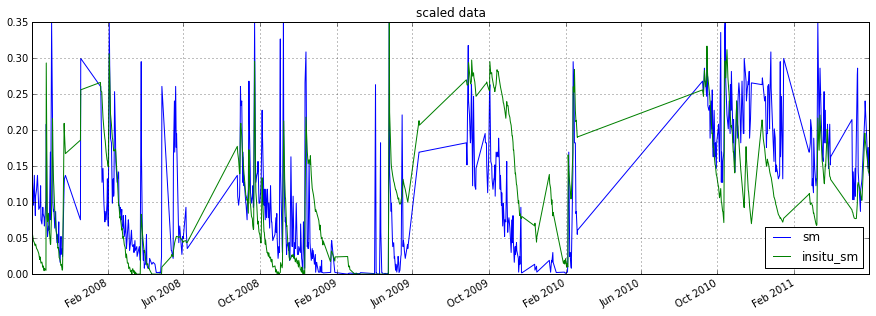
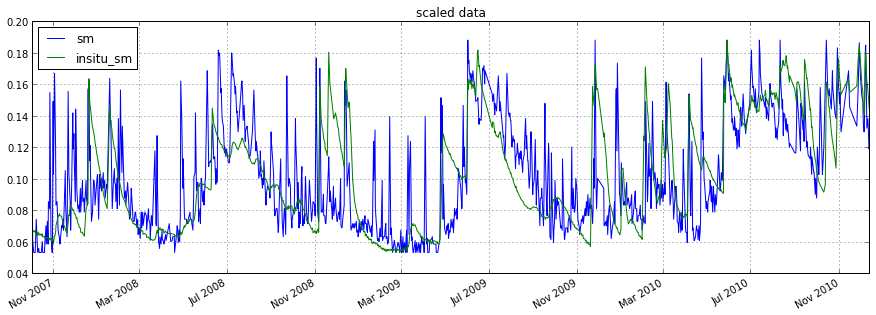
#this takes the matched_data DataFrame and scales all columns to the
#column with the given reference_index, in this case in situ
scaled_data = scaling.scale(matched_data, method='lin_cdf_match',
reference_index=1)
#now the scaled ascat data and insitu_sm are in the same space
scaled_data.plot(figsize=(15,5), title='scaled data')
plt.show()
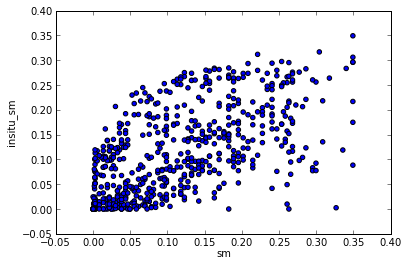
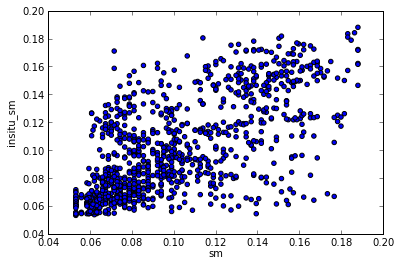
plt.scatter(scaled_data[label_ascat].values,scaled_data[label_insitu].values)
plt.xlabel(label_ascat)
plt.ylabel(label_insitu)
plt.show()
#calculate correlation coefficients, RMSD, bias, Nash Sutcliffe
x, y = scaled_data[label_ascat].values, scaled_data[label_insitu].values
print "ISMN time series:",ISMN_time_series
print "compared to"
print ascat_time_series
print "Results:"
#df_metrics takes a DataFrame as input and automatically
#calculates the metric on all combinations of columns
#returns a named tuple for easy printing
print df_metrics.pearsonr(scaled_data)
print "Spearman's (rho,p_value)", metrics.spearmanr(x, y)
print "Kendalls's (tau,p_value)", metrics.kendalltau(x, y)
print df_metrics.kendalltau(scaled_data)
print df_metrics.rmsd(scaled_data)
print "Bias", metrics.bias(x, y)
print "Nash Sutcliffe", metrics.nash_sutcliffe(x, y)
i += 1
#only show the first 2 stations, otherwise this program would run a long time
#and produce a lot of plots
if i >= 2:
break
ISMN time series: OZNET Alabama 0.00 m - 0.05 m soil moisture measured with Stevens-Hydra-Probe
compared to
ASCAT time series gpi:1884359 lat:-35.342 lon:147.541
Results:
(Pearsons_r(sm_and_insitu_sm=0.61607679781575175), p_value(sm_and_insitu_sm=3.1170801211098453e-65))
Spearman's (rho,p_value) (0.64651747115098912, 1.0057610194056589e-73)
Kendalls's (tau,p_value) (0.4685441550995097, 2.4676437876515864e-67)
(Kendall_tau(sm_and_insitu_sm=0.4685441550995097), p_value(sm_and_insitu_sm=2.4676437876515864e-67))
rmsd(sm_and_insitu_sm=0.078018684719599857)
Bias 0.00168114697282
Nash Sutcliffe 0.246416864767
ISMN time series: OZNET Balranald-Bolton_Park 0.00 m - 0.08 m soil moisture measured with CS615
compared to
ASCAT time series gpi:1821003 lat:-33.990 lon:146.381
Results:
(Pearsons_r(sm_and_insitu_sm=0.66000287576696759), p_value(sm_and_insitu_sm=1.3332742454781072e-126))
Spearman's (rho,p_value) (0.65889275747696652, 4.890533231776912e-126)
Kendalls's (tau,p_value) (0.48653686844813893, 6.6517671082477896e-118)
(Kendall_tau(sm_and_insitu_sm=0.48653686844813893), p_value(sm_and_insitu_sm=6.6517671082477896e-118))
rmsd(sm_and_insitu_sm=0.028314835540753237)
Bias 4.56170862568e-05
Nash Sutcliffe 0.316925662899